





すべての製品
-
 トルコからのTayfun太陽ポンプ インバーターは非常に良質に実際にあり、私達はまた展覧会のためにある昇進プロダクトを準備した。私達は新しい順序をすぐに作ろうと思っている。昨年たった1つのローカル代理店があり、8.がそのうちのいくつかVeikongだけを販売する以上今年、ある!
トルコからのTayfun太陽ポンプ インバーターは非常に良質に実際にあり、私達はまた展覧会のためにある昇進プロダクトを準備した。私達は新しい順序をすぐに作ろうと思っている。昨年たった1つのローカル代理店があり、8.がそのうちのいくつかVeikongだけを販売する以上今年、ある! -
 チリからのクリスチャンそれは非常によい!LCDの選択はそれを使用すること大いにもっと簡単にする。それは使用の容易な利点である。そして強い。すばらしいPCソフトウェア。
チリからのクリスチャンそれは非常によい!LCDの選択はそれを使用すること大いにもっと簡単にする。それは使用の容易な利点である。そして強い。すばらしいPCソフトウェア。 -
 シリアからのBrahimアサドVFD500出力頻度は他が変動しているとき安定している。また出力電流は他がのそういうわけでより多くのエネルギーを節約するにはできる出力頻度余りにより高いよりより少しである。
シリアからのBrahimアサドVFD500出力頻度は他が変動しているとき安定している。また出力電流は他がのそういうわけでより多くのエネルギーを節約するにはできる出力頻度余りにより高いよりより少しである。
コンタクトパーソン :
Terry
電話番号 :
008613910001000
WhatsApp :
+8613923735888
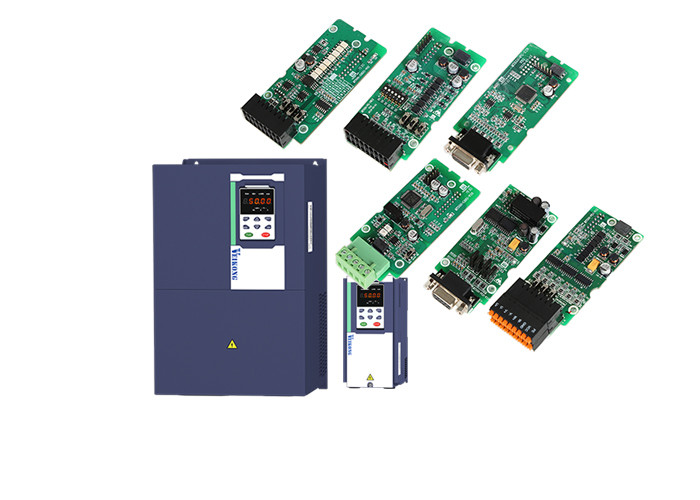
三相単一フェーズVFDの可変的な頻度ドライブ30kw 40hp








商品の詳細
| 電圧 | 380V/220V | 力 | 30Kw/40hp |
|---|---|---|---|
| 制御モード | V/F制御、ベクトル制御 | 保護レベル | IP20/IP65 |
| Communciaton | Modbus485 Canopen Profinet | キーパッド | LEDのキーパッド、LCDのキーパッド、二重表示キーパッド |
| ハイライト | VFDの可変的な頻度ドライブ30kw,VFDの可変的な頻度ドライブ3 40hp,単一フェーズ40hpのvfd |
||
製品の説明
30kw 40hp 220v 380vの可変的な頻度ドライブVFD三相単一フェーズ
VEIKONG VFD500の技術的なデータ:
| 項目 | Specifiation | |
| 入力 | Inuputの電圧 |
1phase/3phase 220V:200V~240V 3段階380V-480V:380V~480V |
| 許可された電圧変動範囲 | -15%~10% | |
| 入れられた頻度 | 50Hz/60Hzの変動5%以下 | |
| 出力 | 出力電圧 | 3phase:0~input電圧 |
| 積み過ぎ容量 |
一般目的の適用:評価される流れの150%の60S 軽い負荷塗布:評価される流れの120%の60S |
|
| 制御 | 制御モード |
V/f制御 ページ カード(SVC)のないSensorlessの変化ベクトル制御 ページ カードとのセンサーの速度の変化ベクトル制御(VC) |
| オペレーティング・モード | 速度制御、トルク制御(SVCおよびVC) | |
| 速度範囲 |
1:100 (V/f) 1:200 (SVC) 1:1000 (VC) |
|
| 速度制御の正確さ |
±0.5% (V/f) ±0.2% (SVC) ±0.02% (VC) |
|
| 速度の応答 |
5Hz (V/f) 20Hz (SVC) 50Hz (VC) |
|
| 周波数範囲 |
0.00~600.00Hz (V/f) 0.00~200.00Hz (SVC) 0.00~400.00Hz (VC) |
|
| 入れられた頻度決断 |
デジタル設定:0.01 Hz アナログの設定:最高の頻度x 0.1% |
|
| 起動のトルク |
150%/0.5Hz (V/f) 180%/0.25Hz (SVC) 200%/0Hz (VC) |
|
| トルクの制御正確さ |
SVC:5Hz5%の上の5Hz10%の中では、 VC:3.0% |
|
| V/fのカーブ |
V / fのカーブのタイプ:、力機能分岐、直線V/fの分離; トルクの倍力サポート:自動トルクの倍力、手動トルクの倍力(出荷時設定) |
|
| 傾斜路を与える頻度 |
線形およびS字型カーブの加速および減速サポート; 範囲0.00s | 60000sを置く加速および減速時間の4グループ |
|
| DCバス電圧制御 |
過電圧の停止制御:出力頻度の電圧欠陥をとばすことを避けるように調節によってモーターの発電を限りなさい;
不足電圧の停止制御:出力頻度のヨーイングの失敗を避けるために調節によってモーターのパワー消費量を制御しなさい
VdcMax制御:出力頻度の過電圧旅行を避けるために調節によるモーターによって発生する電力量を限りなさい; VdcMin制御:出力頻度のジャンプの不足電圧の欠陥を避けるために調節によってモーターのパワー消費量を、制御しなさい |
|
| 搬送周波数 | 1kHz~12kHz (タイプによって変わる) | |
| 起動方法 |
直接開始(重ねられたDCブレーキはある場合もある);速度の追跡の開始 |
|
| 停止方法 | 減速停止(ブレーキがかかる重ねられたDCはある場合もある);停止すること自由 | |
| Maincontrol機能 | 、16速度操作まで、制御、下垂制御を危ない速度の回避、振動頻度操作、加速および減速時間の切換え、VFの分離、刺激の完全な欠陥の記録、欠陥調整、ソフトウェア交換の出力配線parametersfreeswitching、モーターの2グループ アップ/ダウン ターミナル ブレーキがかかることの、プロセスPID制御、睡眠および目覚し機能、作り付けの簡単なPLCの論理、事実上の入出力ターミナル、作り付けの遅延装置、作り付けの比較の単位および論理の単位、変数バックアップとリカバリー揺すりなさい | |
| 機能 | キーパッド | LEDデジタルのキーボードおよびLCDのキーパッド(選択) |
| コミュニケーション |
標準: MODBUSコミュニケーション PROFINETは開き、(開発で) |
|
| ページ カード | 増加エンコーダーのインターフェース・カード(差動出力および開いたコレクター)、回転式変圧器カード | |
| 入れられたターミナル |
標準: 5台のデジタル入力 ターミナルは、そのうちの一つ50kHzまで高速脈拍の入力を支える; 2台のアナログ入力 ターミナル、サポート0 | 10V電圧入力か0 | 20mA現在の入力; 選択カード: 4台のデジタル入力 ターミナル 2アナログ入力terminals.support-10V-+10Vの電圧入力 |
|
| 出力ターミナル |
標準: 1台のデジタル出力 ターミナル; 1台の高速パルス出力機構 ターミナル(開いたコレクターのタイプ)、サポート0 | 50kHz方形波信号の出力; 1台のリレー出力ターミナル(第2リレーは選択はである) 2つのアナログ出力端子、サポート0 | 20mA現在の出力か0 | 10V電圧出力; 選択カード:4台のデジタル出力 ターミナル |
|
| 保護 | 章を保護機能のためのトラブルシューティングそして対策」参照しなさい第6" | |
| 環境 | 設置位置 | 屋内、直接日光、塵、腐食性のガス、可燃性ガス、オイルの煙、蒸気、滴りまたは塩無し。 |
| 高度 | 0-3000m.inverterは高度より高いthan1000mがおよび定格出力の100m 1%流れ高度の増加減れば軽減される | |
| 周囲温度 | 周囲温度が40°Cと50°Cの間にあれば-10°C~ +40°Cの1.5%までに最高50°C (軽減した)定格出力の現在の減少1°Cによる温度なら増加 | |
| 湿気 | 凝縮しないで95%RHよりより少し、 | |
| 振動 | より少しにより5.9 m/s2 (0.6 g) | |
| 保管温度 | -20°C | +60°C | |
| 他 | 取付け | transmural壁に取り付けられた、床制御のキャビネット |
| 保護レベル | IP20 | |
| 冷却方法 | 強制風の冷却 | |
| EMC | セリウムROHS |
内部EMCフィルター EN61800-3に従う 部門C3 第3環境 |
一般的な適用の有名なブランドのvfdを取り替えなさい。
![]()
PID機能
| 40グループPID機能 | ||||
| r40.00 | PIDの最終的な出力価値 | 読まれた唯一の単位:0.1% | - | ● |
| r40.01 | PIDの最終的な設定値 | 読まれた唯一の単位:0.1% | - | ● |
| r40.02 | PIDの最終的なフィードバックの価値 | 読まれた唯一の単位:0.1% | - | ● |
| r40.03 | PIDの偏差の価値 | 読まれた唯一の単位:0.1% | - | ● |
| P40.04 | PIDの参照資料 |
単位のディジット:PIDの主要な参照資料(ref1) 0:Digtitalの設定 1:AI1 2:AI2 3:AI3 (IOの拡張ボード) 4:AI4 (IOの拡張ボード) 5:HDIの高周波脈拍 6:コミュニケーション Tenのディジット:PID Auxilaryの参照資料(ref2)単位のディジットと同じように |
00 | ☆ | |||||||||||||||
| P40.05 | PIDある特定のフィードバックの範囲 | 0.01~655.35 | 100.00 | ☆ | |||||||||||||||
| P40.06 | PIDのデジタル設定0 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
| P40.07 | PIDのデジタル設定1 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
| P40.08 | PIDのデジタル設定2 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
| P40.09 | PIDのデジタル設定3 | 0.0~P40.05 | 0.0% | ☆ | |||||||||||||||
|
PIDの参照資料がデジタル設定のとき、PIDのデジタル設定0~3はDI terminal機能43によって決まる(PIDターミナルI)および44を前もって調整しなさい(事前調整PIDターミナル2):
例えば:AI1がPIDのフィードバックとして使用される時、フル レンジが16.0kg圧力に対応し、PID制御を8.0kgであるように要求すれば;そして16.00への一定P40.05 PIDのフィードバックの範囲、PIDの8.00であるためにP40.06に選り抜きデジタル参照ターミナルはP40.06 (PIDの事前調整の設定0)を置いた
|
|||||||||||||||||||
|
PIDの参照資料がデジタル設定のとき、PIDのデジタル設定0~3はDI terminal機能43によって決まる(PIDターミナルI)および44を前もって調整しなさい(事前調整PIDターミナル2):
例えば:AI1がPIDのフィードバックとして使用される時、フル レンジが16.0kg圧力に対応し、PID制御を8.0kgであるように要求すれば;そして16.00への一定P40.05 PIDのフィードバックの範囲、PIDの8.00であるためにP40.06に選り抜きデジタル参照ターミナルはP40.06 (PIDの事前調整の設定0)を置いた
|
||||||||||||||||||||
| P40.10 | PIDの参照資料の選択 | 0:ref1 1:ref1+ref2 2:ref1-ref2 3:ref1*ref2 4:ref1/ref2 5:分(ref1、ref2) 6:最高(ref1、ref2) 7 (ref1+ref2)/2 8:fdb1and fdb2の切換え |
0 | ☆ | ||||||||||||||||
| P40.11 | PIDのフィードバックsource1 |
単位のディジット0:PIDのフィードバックsource1 (fdb1) 0:AI1 1:AI2 2:AI3 (選択カード) 3:AI4 (選択カード) 4:PLUSE (HDI) 5:コミュニケーション 6:モーター定格出力の流れ 7:モーター定格出力の頻度 8:モーター定格出力のトルク 9:モーター定格出力の頻度 Tenのディジット:PIDのフィードバックsource2 (fdb2) 単位のディジットと同じように |
00 | ☆ | ||||||||||||||||
| P40.13 | PIDのフィードバック機能選択 | 0:fdb1 1:fdb1+fdb2 2:fdb1-fdb2 3:fdb1*fdb2 4:fdb1/fdb2 5:分(fdb1、fdb2)はfdb1.fdb2により小さい価値を取る 6:最高(fdb1、fdb2) fdb1.fdb2により大きい価値を取りなさい 7:(ref1+ref2)/2 8:fdb1and fdb2の切換え |
0 | ☆ | ||||||||||||||||
| P40.14 | PIDの出力特徴 |
0:PIDの出力は肯定的である:フィードバック信号がPIDの基準値を超過する場合PIDのバランスをとるために、インバーターの出力頻度は減る。例えば、要約の間の緊張PID制御 1:PIDの出力は否定的である:フィードバック信号がPIDの基準値より強いときPIDのバランスをとるために、インバーターの出力頻度は増加する。例えば、wrapdownの間の緊張PID制御 |
0 | ☆ | ||||||||||||||||
|
PIDの出力特性はP40.14およびDi terminal 42機能PID陽性/否定的な切換えによって定められる: P40.14 = 0および「42:PIDの肯定的で/否定的な転換の」ターミナルは無効である::PIDの出力特性は肯定的である P40.14 = 0および「42:PIDの肯定的で/否定的な転換の」ターミナルは有効である::PIDの出力特性は否定的である P40.14 = 1および「42:PIDの肯定的で/否定的な転換の」ターミナルは無効である::PIDの出力特性は否定的である P40.14 = 1および「42:PIDの肯定的で/否定的な転換の」ターミナルは有効である::PIDの出力特性は肯定的である |
||||||||||||||||||||
| P40.15 | PIDの出力の上限 | -100.0%~100.0% | 100.0% | ☆ | ||||||||||||||||
| P40.16 | PIDの出力の低限 | -100.0%~100.0% | 0.0% | ☆ | ||||||||||||||||
| P40.17 | Proportaionalの利益KP1 |
0.00~10.00 機能はPIDの入力の比例ゲインPに適用される。 Pは全PIDの調節装置の強さを定める。100の変数はPIDのフィードバックおよびある特定の価値のオフセットが100%のとき、PIDの調節の範囲はである最高調節することを意味する。頻度(必要な機能および差動機能を無視する)。
|
5.0% | ☆ | ||||||||||||||||
| P40.18 | 積分時間TI1 |
0.01s~10.00s この変数はPIDのフィードバックおよび参照の偏差の必要な調節を遂行するためにPIDの調節装置の速度を定める。 PIDのフィードバックおよび参照の偏差が100%のとき、必要な調節装置は時期後に最高を達成する(比例した効果および差動効果を無視する)絶えず働き。頻度(P01.06)または最高。電圧(P12.21)。より短いより強い積分時間はである 調節
|
1.00s | ☆ | ||||||||||||||||
| P40.19 | 差動時間TD1 |
0.000s~10.000s この変数はPIDの調節装置がPIDのフィードバックおよび参照の偏差の必要な調節を遂行するとき変更の比率の強さを定める。 PIDのフィードバックが100%をその時に変えれば、必要な調節装置の調節は(比例した効果および差動効果を無視する)最高である。頻度(P01.06)または最高。電圧(P12.21)。より強いより長く積分時間は調節である。
|
0.000s | ☆ | ||||||||||||||||
| P40.20 | Proportaionalの利益KP2 | 0.00~200.0%。 | 5.0% | ☆ | ||||||||||||||||
| P40.21 | 積分時間TI2 |
0.00s (あらゆる必要な効果) ~20.00s
|
1.00s | ☆ | ||||||||||||||||
| P40.22 | 差動時間TD2 | 0.000s~0.100s | 0.000s | ☆ | ||||||||||||||||
| P40.23 | PID変数切換えの状態 |
0:切換え無し 、使用KP1、TI1、TD1転換してはいけない DI terminal著スイッチ DI terminal第41機能が無効なときKP1、TI1、TD1は使用される;有効な場合KP2、TI2、TD2は使用される PID命令およびフィードバックの偏差の絶対値は、KP1を使用して、P40.24よりより少なくTI1、TD1ある;偏差の絶対値は、KP2を使用して、P40.25より大きいTI2のTD2変数;偏差の絶対値はP40.24~P40.25の間に、2つのパラメータ セット直線にtransitionedある。 |
0 | ☆ | ||||||||||||||||
| P40.24 | PID変数切換えのdevation 1 | 0.0%~P40-25 | 20.0% | ☆ | ||||||||||||||||
| P40.25 | PID変数切換えのdevation 2 | P40-24~100.0% | 80.0% | ☆ | ||||||||||||||||
推薦されたプロダクト

